
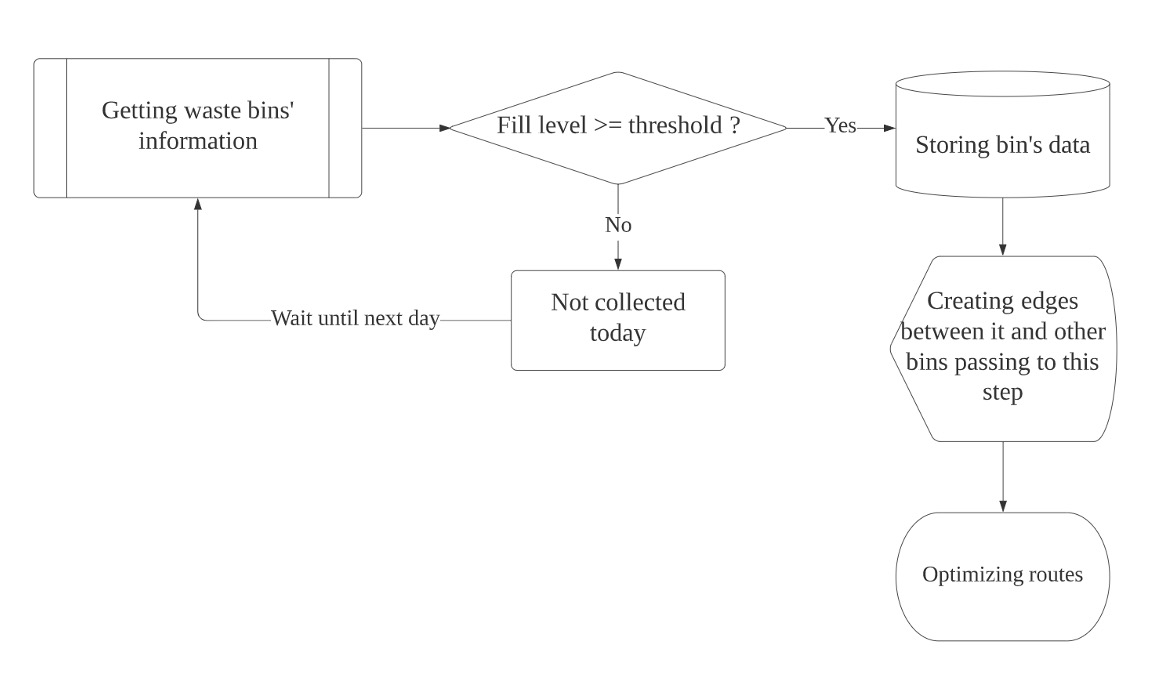
In collecting data, I first applied detection sensors under self-made bins to simulate the filling process. The sensors started measuring each bin's status and decided if this bin was worth being picked up today. If yes, then sensor stored the data and sent it to my computer where a map object would be created that stored paths between valid bins. If no, then this bin had no need to be picked up and therefore skipped today's following procedures. Figure 5 illustrates the process described above.
Realizing that choosing a fixed route daily lies in the fact that drivers lack information about each trashcan's status, I proposed to use detection sensors installed on each trashcan and record the time and height of trash inside the bin in real time, such that I can get the most immediate feedbacks about bin's information. To do this, I bought Arduino Infra-red detection sensors which Ire installed on the simulated trash site and allows another device (my computer) to receive data through internet.
